지능형 로봇통합관제
VLA Brain Orchestrator — 지능형 오케스트레이션
User-Centric Flexibility — No-Code 워크플로우
Universal Linker — 이기종 로봇 유니버설 미들웨어
디지털 트윈 기반 사전 검증
OTA 기반 로봇 SW 자동 업데이트
주요 기능

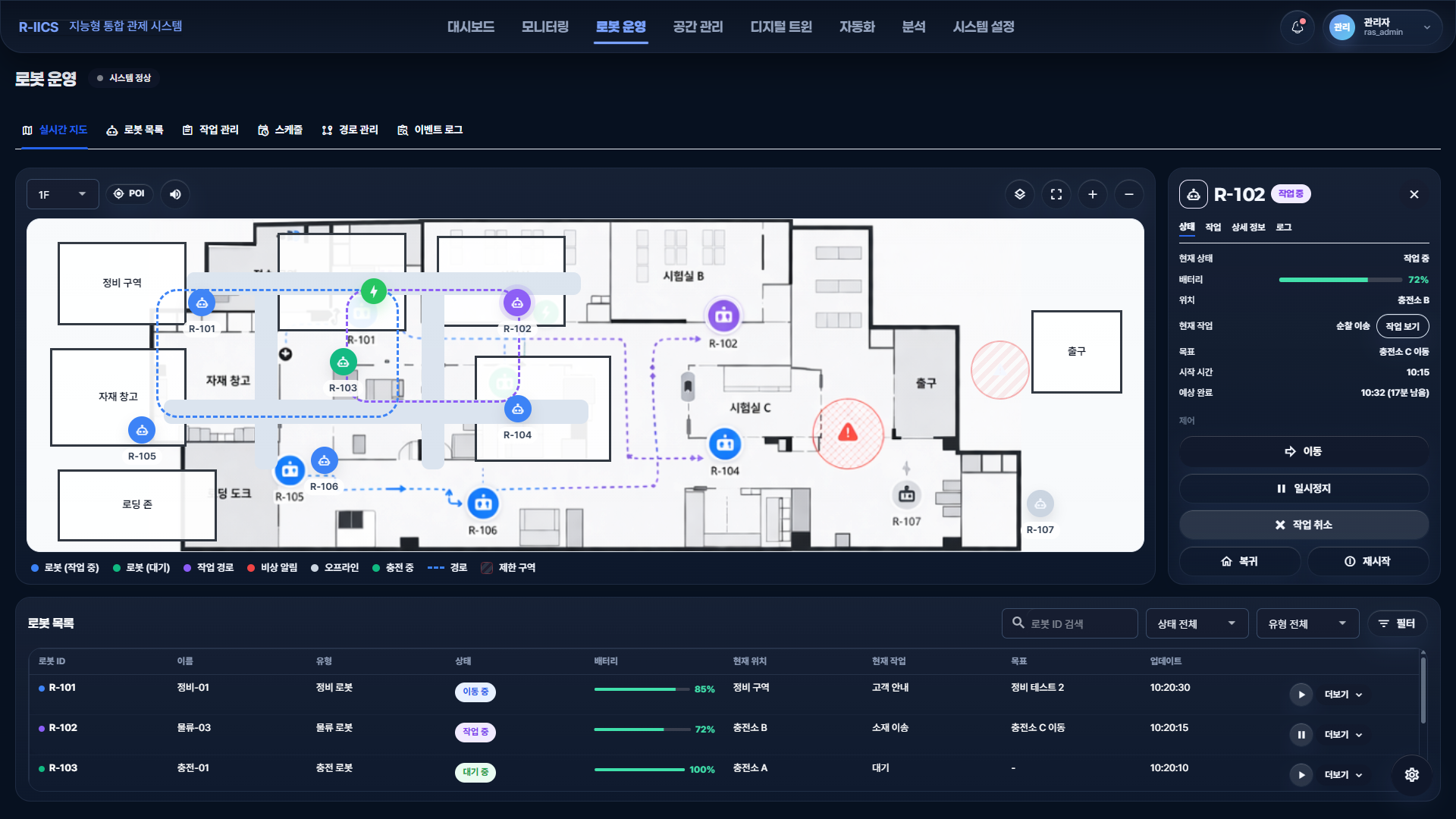
대시보드
전체 로봇 및 설비 상태 통합 모니터링, KPI 시각화 및 실시간 운영 현황 요약
작업관리
로봇 작업을 생성하고 플릿 자동 할당 및 우선순위 설정, 작업 상태 관리
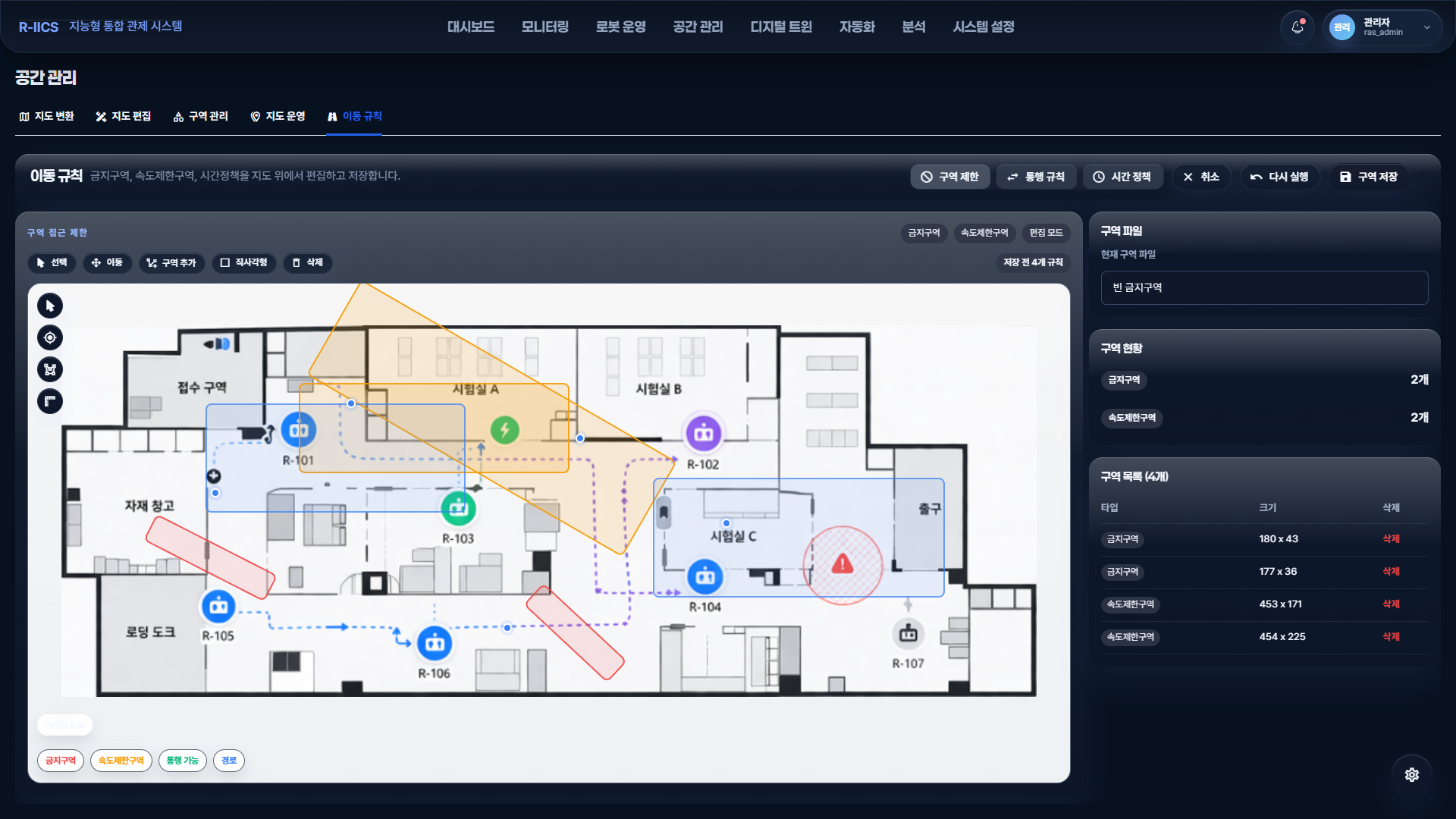
공간관리
작업 구역 정의 및 접근 제한 구역 설정
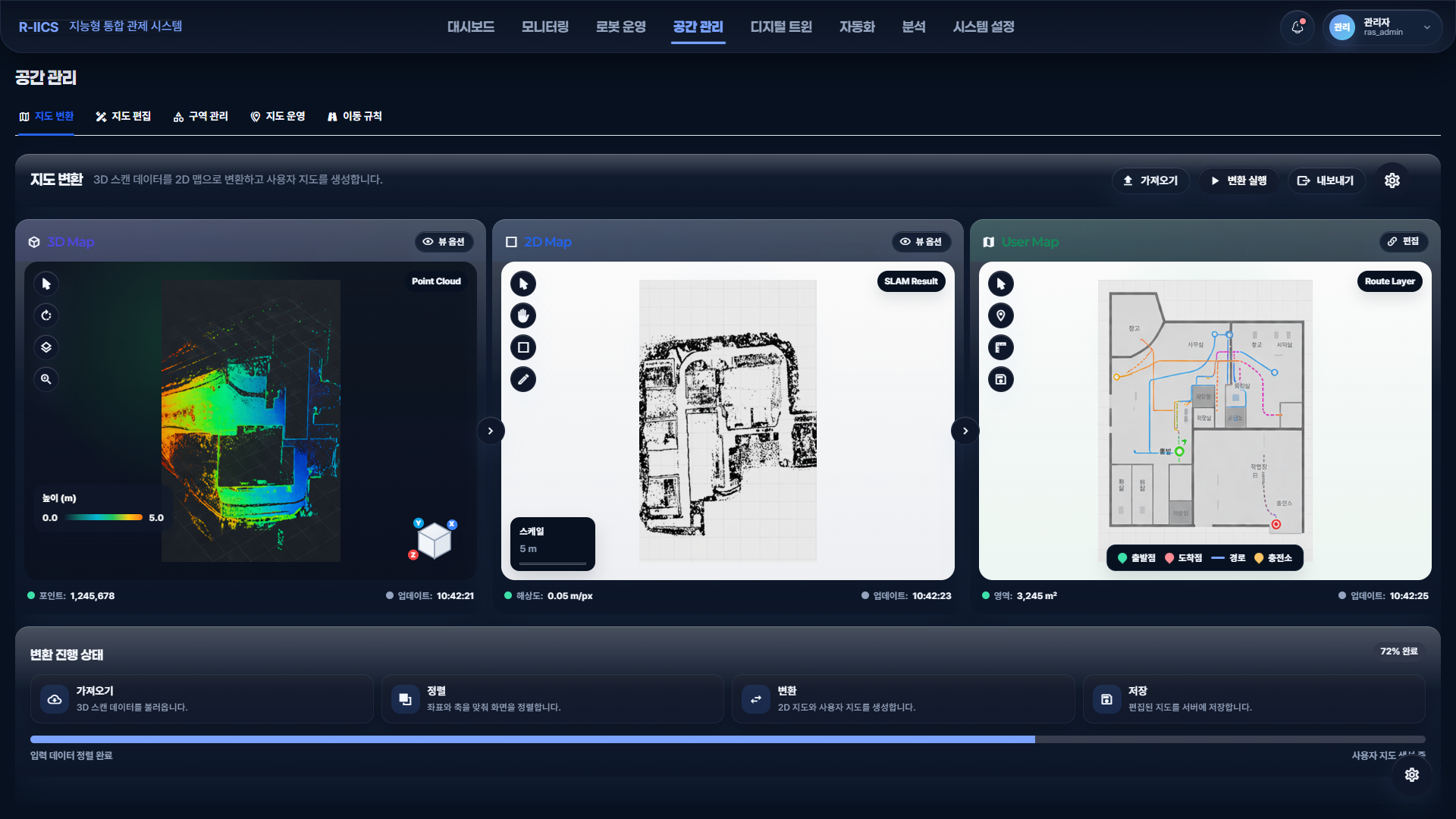
지도편집
위치 좌표 설정 및 이동 경로 정의, 방향 설정, 연결 구조 구성
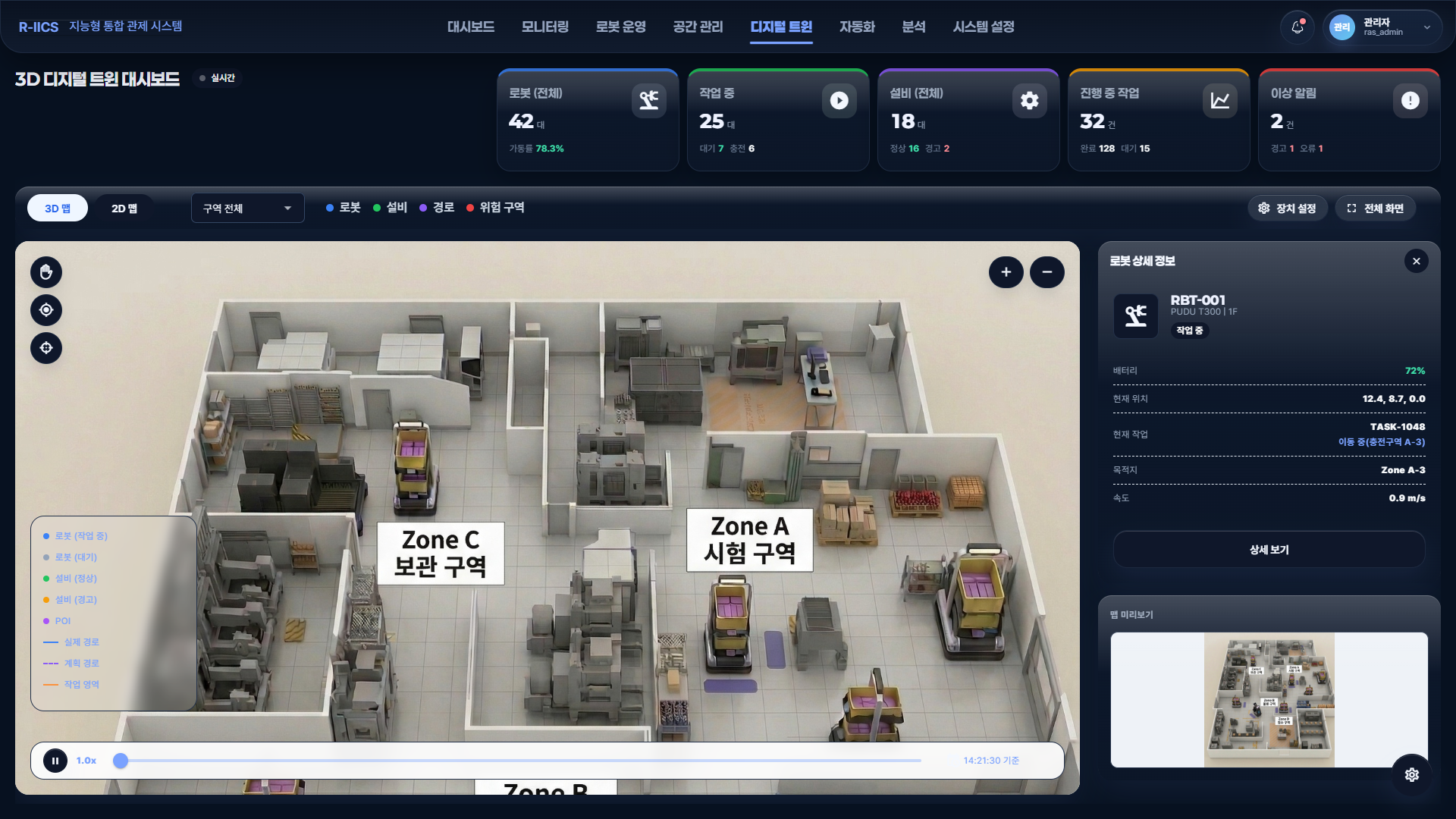
디지털트윈
3D 가상환경 기반 통합관제 실제환경을 반영한 디지털 트윈 맵 제공, 사전 시뮬레이션 및 검증

운영분석
부품 수명 예측 및 로봇 상태 분석, 운영 데이터 로그 관리, 이상 패턴 분석
Content Management System
하나의 시나리오가 현장 실행까지 가는
과정
콘텐츠 구성부터 필드 투입, 액팅 및 실행 확인까지 하나의 흐름으로 진행됩니다.

CMS Scenario Editor
Scenario Editor에서 실행
흐름을 설계
지도 위 Point와 Script를 연결하고, 현장 투입 전 웹에서 실행 흐름을 확인합니다.
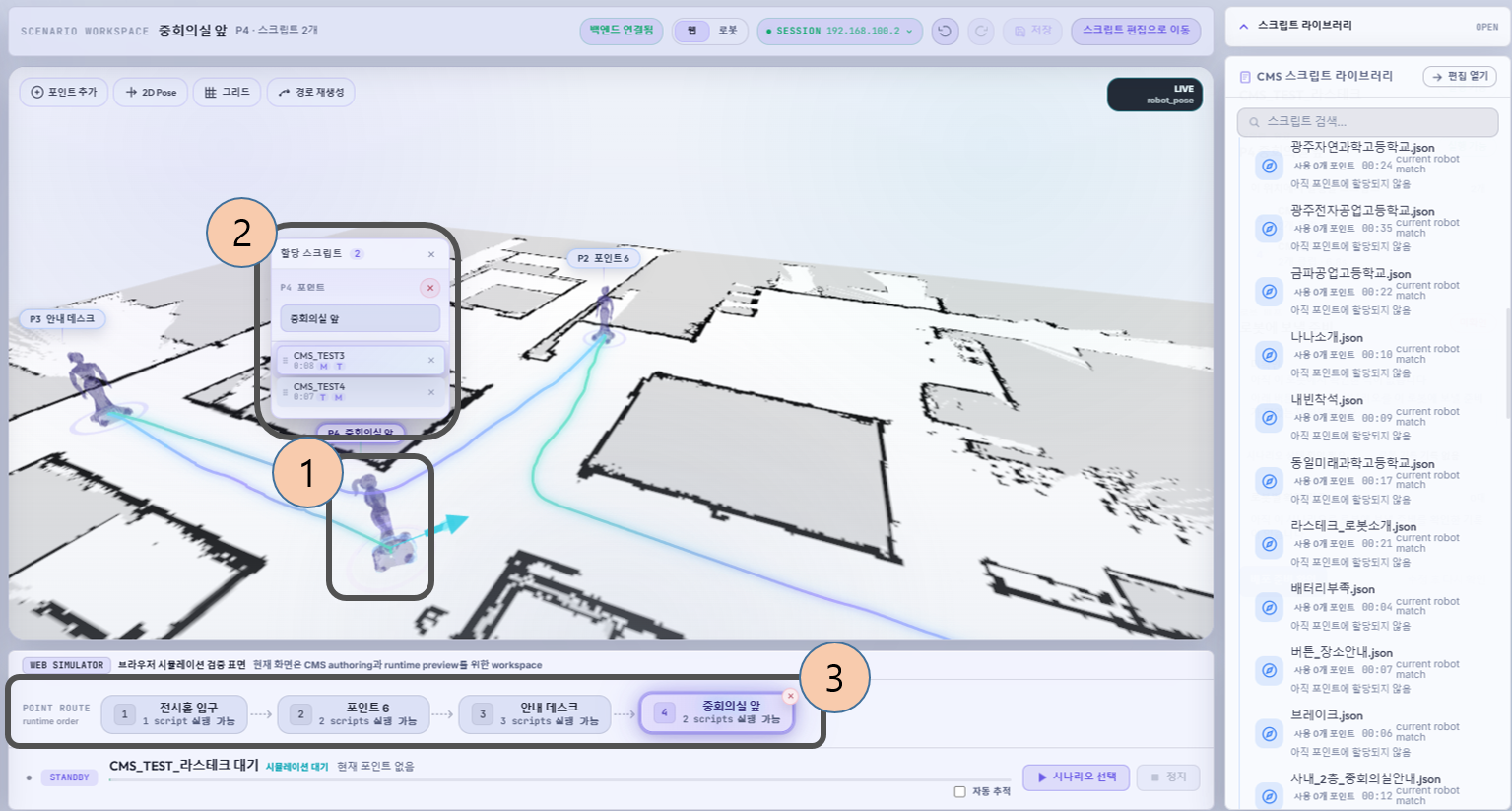
Point 배치
지도 위 실행 위치 설정
Script 연결
Point별 실행 콘텐츠 연결
실행 순서 검증
Point Route로 실행 순서와 타이밍 확인